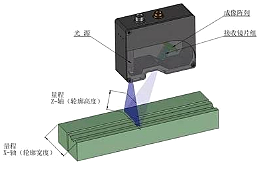
线扫激光算法原理
来源:
阅读:376
发布时间:2022-01-06 10:08:46

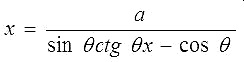
 (远离透镜)
(远离透镜)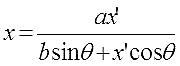 (靠近透镜)。
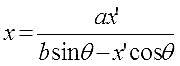
(靠近透镜)。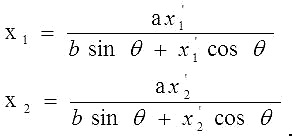 通过计算得出:
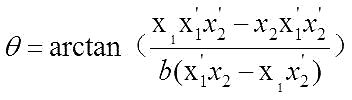
通过计算得出: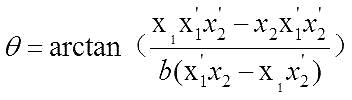

(来源:网站,版权归原作者)
(远离透镜)(靠近透镜)。通过计算得出:(来源:网站,版权归原作者)
专注光电
前沿技术
1000+海外
厂家合作
专业服务
技术团队
Copyright © 2024 rayllie.com 天津瑞利光电科技有限公司 版权所有
 津公网安备12010102000950号
|
津ICP备17001797号-1
津公网安备12010102000950号
|
津ICP备17001797号-1
